

Actualizacion ESP8266 Industrial Modbus TCP IP V2.0

Hace mucho tiempo encontre un grupo de personas en forums.adafruit que ya tenian un avance y se han implementado los ejemplo y mejoras sugeridas gracias a ibbba por el aporte.
El codigo de programacion para el ESP8266 en este caso se implemento en Arduino IDE versiones superiores a 1.6.4. Estos 2 tutoriales indicaran la conexión y programación basica de los modulos ESP8266 01 y 03.
TUTORIAL

TUTORIAL

Pruebas Anteriores libreria ModbusTCPSlave
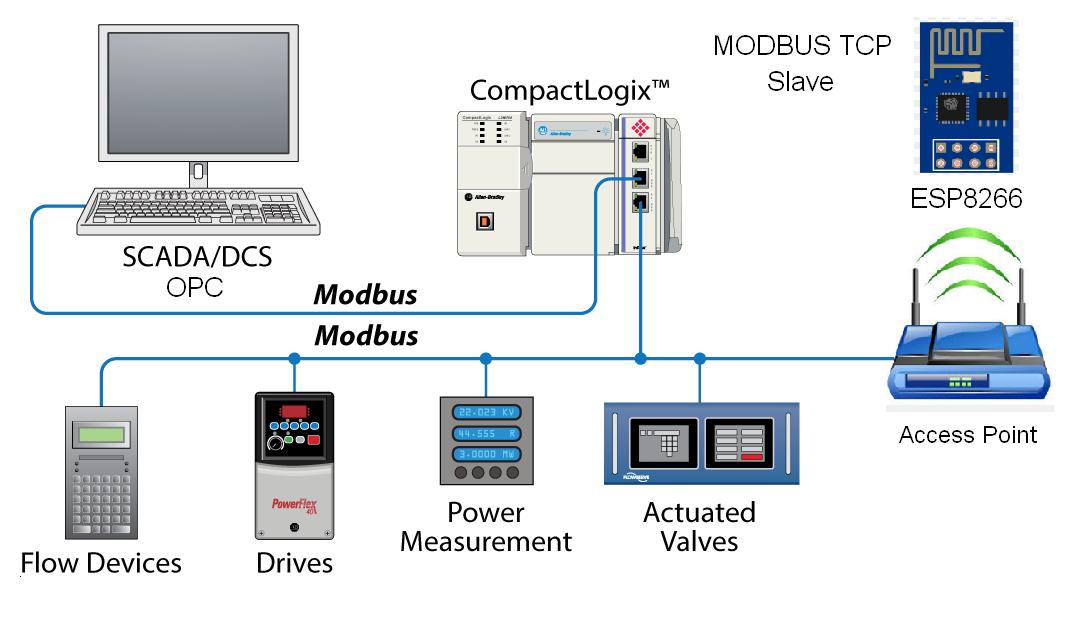
ESP8266 - 01 Esclavo Modbus TCP IP (Ethernet) para Aplicaciones Industriales CONCLUSIONES
En las pruebas anteriores con la libreria Original ModbusTCPSlave, presentaba 2 inconvenientes de aplicación:
Ejecucion de Codigo
Funcionaba correctamente la comunicacion modbus tcp, pero no ejecuta el codigo en la rutina void loop, como solucion temporal se modifica la libreria para el ESP8266 detenga la conexión y reconecte nuevamente, el problema que presenta este metodo es tiempo de reconexion puede hacer que el maestro aunque acepte los datos indique error en la recepción de datos.
Puerto Serial
Originalmente el puerto serial del ESP8266 era utilizado como puerto de depuración en hexadecimal, he realizado modificaciones en la librería para que el Serial pueda ser utilizado de manera libre.
VIDEO Actualizacion ESP8266 Industrial Modbus TCP IP V2.0
MEJORAS REALIZADAS
-Con las nuevas modificaciones se ha omitido la desconexion permitiendo un flujo constante de comunicación si detener obligatoriamente la conexión entre el ESP8266 y el maestro modbus tcp.
Ticker
-Se ha implementado la libreria Ticker creada y documentada por igrr, es un objeto que va a llamar a una función dada con un cierto período. Cada Ticker llama a una función. Puede tener tantos como desee tickers, siendo la única limitación de memoria.
Nota importante: al crear tickers tener en cuenta no crear ningun delay, afectaria tanto la comunicación del protocolo modbus, como la ejecución de dicha función.

PRUEBAS REALIZADAS
Se realizara la conexión entre el ESP8266 y un simulador Modbus tcp Configurado como Maestro.
-Inicialmente se crea el Ticker Parada.
DESCRIPCION DE CODIGO
se crea la funcion llamada valor y se definen 2 Holding Registers:
Mb.MBHoldingRegister[0] = Holding Registers 1
Mb.MBHoldingRegister[1] = Holding Registers 2
Mb.MBHoldingRegister[0] enviara un valor random(0,51) hacia el Maestro Modbus y validar la actualizacion del valor.
Mb.MBHoldingRegister[1] se utilizara para la lectura de un valor enviados desde el Maestro modbus y desde el terminal serial se validara la actualizacion.
Se ejecutara la rutina modbus Mb.Run(); y se ejecutara el Ticker Parada.attach_ms(25,valor); cada 25ms realizando lo creado en la funcion valor.
| void loop() | |
| { | |
| Mb.Run(); | |
| delay(10); | |
| ////Ticker Function | |
| Parada.attach_ms(25,valor); | |
| } |
Tomando este ejemplo como base, se podrían realizar funciones para manejo de I/O analogas y digitales, calculos y demas, solo teniendo en cuenta no implementar ningun delay.
POSIBLES APLICACIONES INDUSTRIALES
Integraciones con software Industrial OPTO22
TUTORIAL
Donde Comprar ?
Codigo y librerias ESP8266_Industrial_ModbusTCP_V2
Arduino + ESP8266 + Software Opto22 ejemplo Scada Industrial
Arduino Mega 2560 Display Oled I2C Modbus Maestro RTU Conexion Scada Industrial
Mas Información:
Canal Youtube
PDAControl








